




 ,其中+ p A V In : 7 W O 是转动惯量, 是角速度。因为假设杠杆没有质量,系统的惯性相当于一个固定的圆柱体:
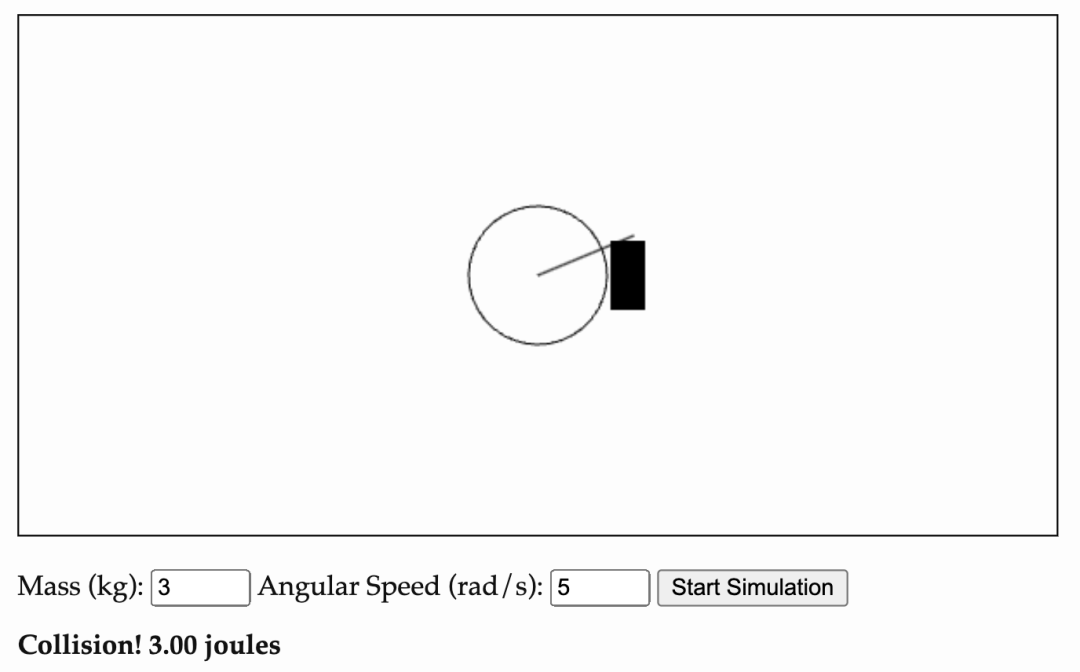
,其中+ p A V In : 7 W O 是转动惯量, 是角速度。因为假设杠杆没有质量,系统的惯性相当于一个固定的圆柱体: 。代入数值可以算出 I = 0.24 kg⋅m^2。因此,可. + |以进一步算出这个系统的旋转动能为 3 焦Y % 9耳。
。代入数值可以算出 I = 0.24 kg⋅m^2。因此,可. + |以进一步算出这个系统的旋转动能为 3 焦Y % 9耳。

以上就是机器人把握好手上的力道,安全地做家务有多难?1X人工智能副总裁撰文详解的详细内容! m a e 1!
 |
|

 |
 |
,其中+ p A V In : 7 W O 是转动惯量, 是角速度。因为假设杠杆没有质量,系统的惯性相当于一个固定的圆柱体:。代入数值可以算出 I = 0.24 kg⋅m^2。因此,可. + |以进一步算出这个系统的旋转动能为 3 焦Y % 9耳。
以上就是机器人把握好手上的力道,安全地做家务有多难?1X人工智能副总裁撰文详解的详细内容! m a e 1!
 微信扫一扫
支付宝扫一扫
微信扫一扫
支付宝扫一扫
在线咨询:
工作时间:周一至周五,9:30-18:30,节假日休息








{kind=link}