一个有效的复杂系统总是从一个有效的简单系统演化而来的。——John Gall
在 Transformer 模型中,位置编码(Positional Encoding) 被用来表示输入u M 8 j Z i序列中的单词G 8 /位置。与隐式包含顺序信息的 RNN 和 CNN 不同,Transformer 的架构中没有内置处理序列顺序的机制,需要通过位置编码显式地为模型提供序列中单词的位置信息,以更好地学习序列关系。
位置编码通常通过数学函数生成,目的是为每个位置生成一个独特的向量。这些向量在嵌入空间中具有特定的性质,比如周期N 9 M d性和连续性。
在最近的一篇文章中,HuggingFace 机器学习工程师 Ch@ M bristopher Fleetwood 介绍5 y 9 c L w \了逐步发现 Transf= / u ( V 2 C Mormer 模型中最先进位置编码的方法。为2 @ u J z @ @ q A此,作者会讲述如何不断改进位置编码方法,最终形成旋转位7 i & : ; \ M /置编码 (RoPE),并在最新的 LLama 3.2 版本和大多数现6 v 9 3 P !代 Transform( $ T , 2er 中使用。在读这篇文章前,你需要掌握一些基本的线性代数、三角学和自注意力的知识。
与所有问题一样,最好首先了解我们想要实现的目标。Transformer 中的自注意力机制用于理解序列中 token 之间的关系。自注意力是一种集合运算,这意味着它是置换等变的。如果我们不R 0 + % | [ Z x利用位置信息来丰富自注意力,就无法确定许多重要的关系。
举例说明最能2 = 3 ; B i $ +说明这一点。
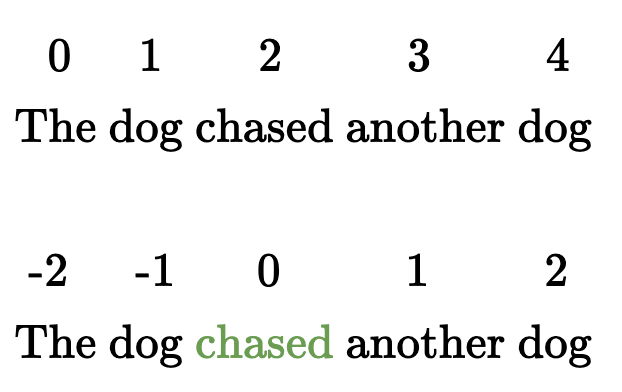
考虑一4 l ? 8 v下这个句子,其中同一个单词出现在不同的位置:
直观地看,「狗」指的是两个不同的实体。如果我们首先对它们进行 token 化,映射到 Llama 3.2 1B 的真实 token 嵌入,并将它们传递给 torch.nn.MultiheadAttention ,会发生什么。
import torchimport torch.nn as nnfrom transformers import AutoTokenizer, AutoModelmodel_id = "meta-llama/Llama-3.2-1B"tok = AutoTokenizer.from_pretrained(model_id)model = AutoModel.from_pretrained(model_id)text = "The dog chased another dog"tokens = tok(text, return_tensors="pt")["input_ids"]embeddings = model.embed_tokens(tokens)hdim = embeddings.shape[-1]W_q = nn.Linear(hdim, hdim, bias=False)W_k = nn.Linear(hdim, hdim, bias=False)W_v = nn.Linear(hdim, hdim, bias=False)mha = nn.MultiheadAttention(embed_dim=hdim, num_heads=4, batch_first=True)with torch.no_grad(): for param in mha.parameters(): nn.init.normal_(param, std=0.1) # Initialize weights to be non-negligibleoutput, _ = mha(W_q(embeddings), W_k(embeddings), W_v(embeddings))dog1_out = output[0, 2]dog2_out = output[0, 5]print(f"Dog output identical?: {torch.allclose(dog1_out, dog2_out, atol=1e-6)}") #True
登录后复制
可以看到,如果没V w U 6 – K有任8 7 8 @何9 A x B / 8 8 q n位置信息,那么(多头)自注意力运算的输出对于不同位置的相同` ? j K _ A q N g tok# Q T Y B Ien 是相同的,尽管这些 token 显然代表不同的实体。
让我们开始设计一种利用位置信息增强自注意力的方法,以便它可以确定按位置编码的单词之间的关系( f E I d。
为了理解和设计最佳编码方案,让我们探讨一下这种/ l [ G (方案I Z R T j应具备的一些理想特性。
属性 1 :每个位置的唯一编码(H ~ p L l \ \ I跨序列)
每个位置7 5 T s都需要一个无论序列长度如何都保持一致的唯一编码 – 无论当前序列的{ V l P长度是 10 还是 10,000,位置 5 处的标记都应该具有相同的编码。
位置之间的关系在数学上应该是简单的。如果知b Y T道位a ; ^ ! 3 w 4 ! ]置 p 的编码,那么计算位置 p+k 的编码就应该很简单,这样模型就能更容易地学; O R习位置模式。
如果你想一想如何在数线上表示数字,就不难理解 5 距离 3 是 2 步,或者 10 距离 15 是 5 步。同样的直观关系也应该存在@ B y ; d i J于编码中。
属性 3:~ z C B可泛化到比训: R V T练中遇到的序列更长的序列上
为了提高模型在现实世界中的实用性,; C i f L B它们应该在训练分布7 + P } Z ] l之外泛化。因此,编码方案需要有足够的适应性,以处理意想不到的输入长度,同时又不违反任何其他理想特性。
如果位置编码能从一个确定的过程中产生,那将是最理想的。这样,模型就能有效地学习编码方案背后的机制。
随着多模态模型成为常态,位置编码方n [ [ Y U案必须能够自然地从 1D 扩展到 nD。这将使模型能够使用像图像g 5 Z D或脑部扫描这样的D N k J c D数据,它们分别是 2D 和 4D 的。
现在我们知道了理想的属性(以下简称为 ),让我们开始设计和迭代编码方案吧。
我. _ W d们首先想到的方法是将 token 位置的整数值添加到 token 嵌入的每个分量中,取值范围为 0→L, ] g \ /,其中 L 是当前序列的长度。
),让我们开始设计和迭代编码方案吧。
我. _ W d们首先想到的方法是将 token 位置的整数值添加到 token 嵌入的每个分量中,取值范围为 0→L, ] g \ /,其中 L 是当前序列的长度。
 Inteu i [ u ` 8 F DgerEncoding
在上面的动画中,我们为索引中\ 4 f 2 D S B的 token 创建了位{ $ M O z c n i置编码向量,并将其添加到 token 嵌入中。这里的嵌入值是 L~ z ; M A 6lama 3.2 1B 中真实值的子集。可以观察到,这些值都集中在 0 附近。这样可以避免在训练过程中出现梯度消失或爆炸的情况,因此,我们希望在整个模型中都能保持这种情况。
很明显,目前的方法会带来问题,位置值的大d w o # y小远远超过了输入的实际值。这意味着信噪比非常低,模型很难从位置信息中分离出语义信息。
有了这一新知识,一个自然的后续方法可能是将位置值归一化P J ^ L为 1/N。这就将数值限制在 0 和 1 之间,但也带来了另一个问题。如果我们选择 N 为当前序D R |列的长度,p h @ N B w k 6 +那么每个长度不同的序列的位置值就会完全不同,这就违反了
Inteu i [ u ` 8 F DgerEncoding
在上面的动画中,我们为索引中\ 4 f 2 D S B的 token 创建了位{ $ M O z c n i置编码向量,并将其添加到 token 嵌入中。这里的嵌入值是 L~ z ; M A 6lama 3.2 1B 中真实值的子集。可以观察到,这些值都集中在 0 附近。这样可以避免在训练过程中出现梯度消失或爆炸的情况,因此,我们希望在整个模型中都能保持这种情况。
很明显,目前的方法会带来问题,位置值的大d w o # y小远远超过了输入的实际值。这意味着信噪比非常低,模型很难从位置信息中分离出语义信息。
有了这一新知识,一个自然的后续方法可能是将位置值归一化P J ^ L为 1/N。这就将数值限制在 0 和 1 之间,但也带来了另一个问题。如果我们选择 N 为当前序D R |列的长度,p h @ N B w k 6 +那么每个长度不同的序列的位置值就会完全不同,这就违反了 。
有没有R ( , 6 h F C更好的方法来确保我们的数字介于 0 和 1 之间呢?如果我们认真思考一段时间,也许会想到将十进制数转换为二进制数。
我们可以将其转换为二进制表示法,并将我们的值(可能已归一化)与嵌入维度相匹配,而不是将我们的(可能已归一化的)整数位置添加到嵌入的每个分量中,如下图所示。
。
有没有R ( , 6 h F C更好的方法来确保我们的数字介于 0 和 1 之间呢?如果我们认真思考一段时间,也许会想到将十进制数转换为二进制数。
我们可以将其转换为二进制表示法,并将我们的值(可能已归一化)与嵌入维度相匹配,而不是将我们的(可能已归一化的)整数位置添加到嵌入的每个分量中,如下图所示。
 Binar. ^ D OyEnc{ D koding
我们将感兴趣的位置(252)转换为二进制表示(11111100),并将每一位添加到 token 嵌入的相应组件中。最小有效位(LSB)将在每个后续标记的 0 和 1 之间循环,而最大有效位(MSB)将每 2^(n-1) 个 token 循环一次,其中 n 是位r u A & J \数H { % 3。你可以在下面的W ; M – & G \ {动画中看到不同索引的位置9 9 f , b A编码向量。
我们已经解决了数值范围的问题,现在我们W 5 g p有了在不同序列长度上保持一致的唯一编码。如果我们绘制 token 嵌入的低维版本,并可视化不同值的二进制位置向量] i ? e的加法,会发生M & m b B q _什么情况呢?
可以看到,结果非常A i E「跳跃」(正如我们对二进制离散性的预n 5 [ Q 3 ~ P \ j期)。优化过程喜欢平滑、连续和可预测的变化。那么有哪些具有类似取值范围的函数是平滑连续的吗?
如果我们稍& P l e 9 i加留意,就会发现 sin 和 cos 都符合要求!
上面的动画形象地展示了我们的位置嵌入,如3 B | R + + E果每个分量都是由波长逐渐增加的 sin 和 cos 交替绘制而成。如果将X & H l C 2其与之前的动画进行; Z / : ; W j O比较,你会发现两者有惊人的相似之处。
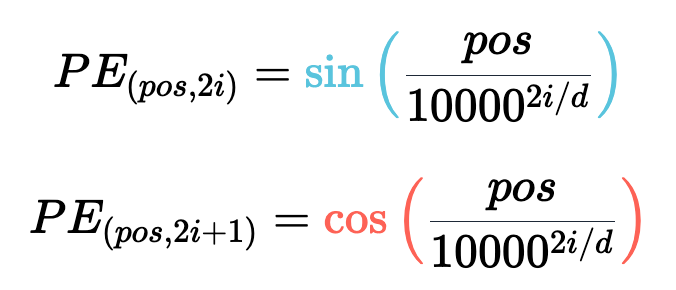
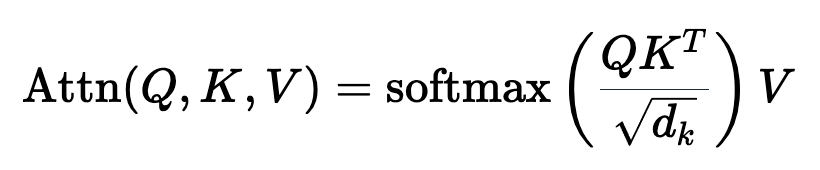
现在,我们已经掌握了正弦波嵌入的方法,这最初是在《Attention is all you need》论文中定义的。让我们来看看方程式:
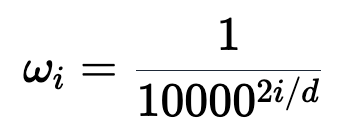
其中,pos 是词块位置索引,i 是位置编码向量中的分量索引,d 是模型维度。10,000 是基本波长(下文– R u简称为 ),我们根据分量索引的函数对其进行拉伸或压缩。我鼓励大家输入一些实际值来感受这种几何级数。
这个等式有几个部分乍看之下令人困惑。作者是如何选择 10,00 的?为什么偶数和奇数位置分别使用 sin 和 cos?
看来,使用 10000 作为基本波长是通过y j *实验确定的。破解 sin 和 cos 的用法涉及的问题较多,但对我们的迭代理解方法至关重要。这里的关键Q l G l z 5 I :是我们希望两个编码位置之间存在线性关系 (
Binar. ^ D OyEnc{ D koding
我们将感兴趣的位置(252)转换为二进制表示(11111100),并将每一位添加到 token 嵌入的相应组件中。最小有效位(LSB)将在每个后续标记的 0 和 1 之间循环,而最大有效位(MSB)将每 2^(n-1) 个 token 循环一次,其中 n 是位r u A & J \数H { % 3。你可以在下面的W ; M – & G \ {动画中看到不同索引的位置9 9 f , b A编码向量。
我们已经解决了数值范围的问题,现在我们W 5 g p有了在不同序列长度上保持一致的唯一编码。如果我们绘制 token 嵌入的低维版本,并可视化不同值的二进制位置向量] i ? e的加法,会发生M & m b B q _什么情况呢?
可以看到,结果非常A i E「跳跃」(正如我们对二进制离散性的预n 5 [ Q 3 ~ P \ j期)。优化过程喜欢平滑、连续和可预测的变化。那么有哪些具有类似取值范围的函数是平滑连续的吗?
如果我们稍& P l e 9 i加留意,就会发现 sin 和 cos 都符合要求!
上面的动画形象地展示了我们的位置嵌入,如3 B | R + + E果每个分量都是由波长逐渐增加的 sin 和 cos 交替绘制而成。如果将X & H l C 2其与之前的动画进行; Z / : ; W j O比较,你会发现两者有惊人的相似之处。
现在,我们已经掌握了正弦波嵌入的方法,这最初是在《Attention is all you need》论文中定义的。让我们来看看方程式:
其中,pos 是词块位置索引,i 是位置编码向量中的分量索引,d 是模型维度。10,000 是基本波长(下文– R u简称为 ),我们根据分量索引的函数对其进行拉伸或压缩。我鼓励大家输入一些实际值来感受这种几何级数。
这个等式有几个部分乍看之下令人困惑。作者是如何选择 10,00 的?为什么偶数和奇数位置分别使用 sin 和 cos?
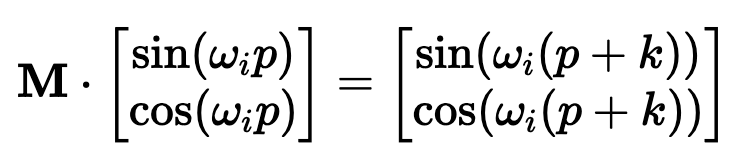
看来,使用 10000 作为基本波长是通过y j *实验确定的。破解 sin 和 cos 的用法涉及的问题较多,但对我们的迭代理解方法至关重要。这里的关键Q l G l z 5 I :是我们希望两个编码位置之间存在线性关系 ( )。要理解正弦和余弦如何配合使用才能产生这种线性关+ y 6 x J N 5 8 $系,我们必须深入学习一些三角学知识。
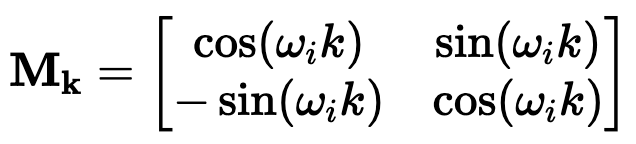
考虑一串正弦和& \ . t ] I y余弦对,每对都与频率 _i 相关联。我们的目标是找到一个线性变换矩阵 M,它能将这些正弦函数移动一个固定的偏移量 k:
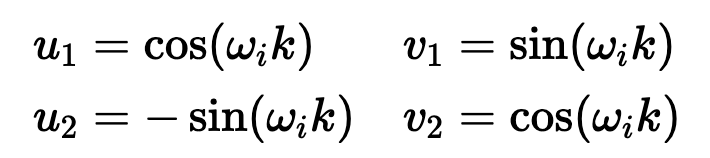
要找到这个变换矩阵,我们可以将其表示为一个包含未知系数 uE D n 7_1y u 2 %、v_1、u_2 和 v_2 的一般 22 矩阵:
通过匹配系数,此展开式为我们提供了两个方程的系统:
通过比较两边的 sin (_ip)} t 0 5 ; p 和 cos (_ip) 项,我们可以解出未知系数q I z b : B –:
如果你以前做过游戏编程,你可能会发现我们的推导结果非常熟悉。没错,这就是旋转矩5 R O Z ,阵。
因此,早在 2017F d n S V 3 A U { 年,Noam Shazeer 在《Attention is all you nO \ \ &eed》论文中设计的编码方案就已经将相对位置编码为旋转。从正s u ? j V & K弦编码到 RoPE 又花了 4 年时间,尽管旋转已经摆在F 6 w桌面上……
在了解了旋转在这里的X J @重要性之后,让我们回到我们的激励样本,尝试为下一次迭代发现一些直觉。
在8 i – 6 L _ e ` !上面,我m r o 3 ^ 8们可以看到 token 的绝对位置,以及从 chased 到其他 token 的相对位置。通过正弦编码,+ E M o / 7 : U ]我们生成了一个单独的向量来表示绝对位置,并使用一些三角函数技巧来编码相对位置。
当我们试图理解这些句子时,这个单词是这篇博文的第 2149 个单词重要吗?还是我们关心它与周围单词的关系?一个单词的绝对位置对其意义来说很少重要,重要的是单词之间的关系。
从这一点出发,在自注意力的背景下考虑位置i + V @ E = ` j编码是关键。重申一下,自注意力机制使模型能够衡量输入序列中不同元素的重要性,并动态调整它们对输出的影响。
在我们以前的迭代中,我们已经生成了一个单独的位置编码向_ 5 8 T n @量,并在 Q、 K 和 V 投影之前将其添加到我们的 t_ m , B x u aoken 嵌入中。通过将位置信息直接添加到 token 嵌入中,我们正在用位置信息污染语义信息。我们应该尝试在不修改规范的情况下对信息进行编码。转向乘法是关键。
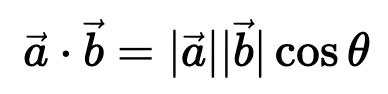
使用字典类比,当查找一个词 (查询) 在我们的字典 (键) ,附近的词应该比遥远的词有更多的影响。一个 token 对另一个 to6 v 5 9 T p tken 的影响是由 QK^T 点积决定的 —— 所以这正是我们应该关注位置编码的地方。
上面显示的点乘的几何解释给了我们一个洞察:我们可以通过增加或减小两个向量之f $ ? \ 8 w u C间的夹角来调整我们的两个向量的点积的结果。此外,通过旋转向量,我们对向量的范数完全没有影响,这个范数编码了我们 token 的语义信息。
因此,现在我们知道注意力集中在哪里,并且V A K x Q ( J从另一个角度看到了为什么旋转可能是一个合理的「通道」,在其中编码我们的位置信息,让我们把它们放在一起。
RoForm 的论文中定义了旋转位置编码或 RoPE (苏剑林在他的博客中独立设计了它)。如5 z \果你直接跳到最终结果,这看起来像是巫术,通过在自注意力 (更具体地说是点积) 的背景下思考正弦编码,我们可以看到它是如何整合在一起的。
就像在 Sinur K Q \ * q ; y usoidal En$ ] 9 2coding 一样,我们把向量 (q 或 k,而不是预先投影 x) 分解成 2D 对 / 块。我们没有直接编码绝对位置,而是加入一个我们从频率缓Q L T y R u慢递减的正弦函数中提取的矢量,我们切入 chase,通过将每对旋转矩阵相乘来编码相对位置。
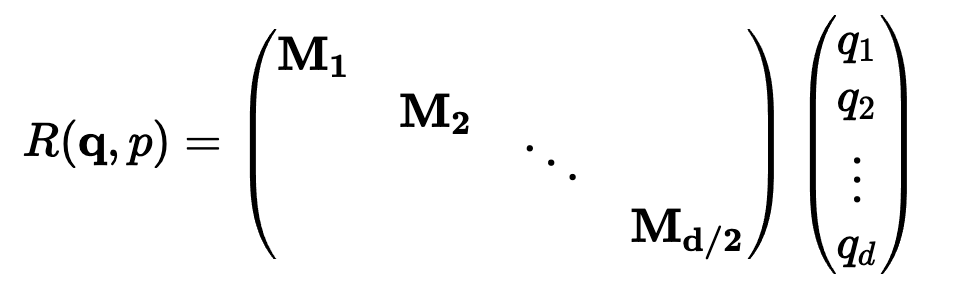
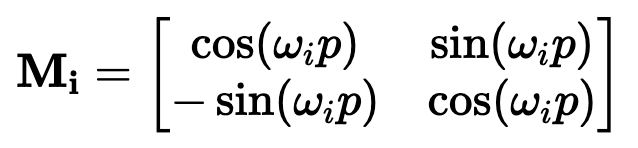
设 q 或 k 是位置为 p 的输入向量。我们创建了一个块m e E m对角矩阵– i N l i y,其中 M_i 是该组件对所需旋转的对应旋转矩阵:
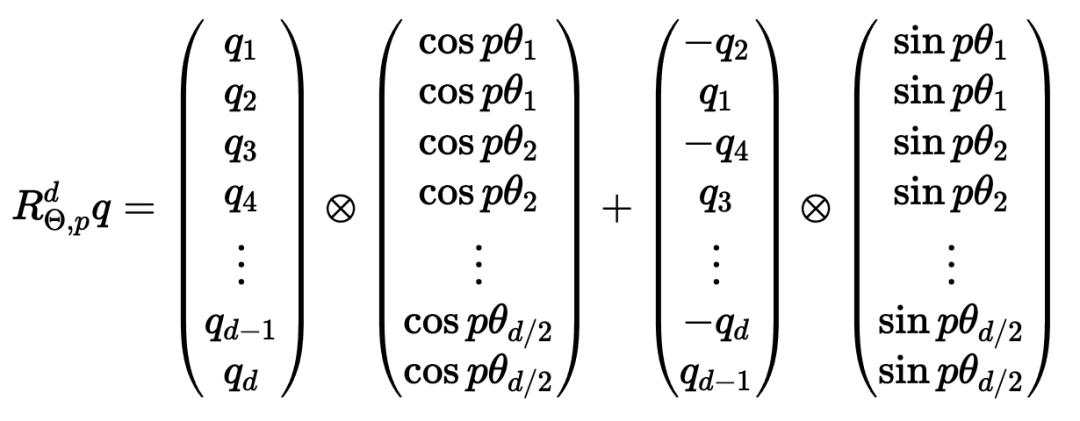
在实践中,我们不使用矩阵乘法来计算 RoPE,Z a k , A _ \ \ Y因为使用这样一个稀疏的矩阵会导致计算效率低下。相反,我们可以利用计算中的规则模( f j式,将旋转直接应用于独立的元素对:
就是这样!通过巧妙地将我\ R B 8 7 m O们的旋转应用于点积之前的 q 和 k 的 2D 块,并从加法转换为乘法,我们可以在评估中获得很大的性能提升。
我们已经探讨了 1D 情况下的 RoPE,这一点,我希望你已经获得了一个直观的理解,公认的非直观组成部分的 transformer$ Y m & V @ 7 [。最后,让我们探索如何将其扩展到更高的维度,例如图像。
第一直觉可能是直接使用图像中的
)。要理解正弦和余弦如何配合使用才能产生这种线性关+ y 6 x J N 5 8 $系,我们必须深入学习一些三角学知识。
考虑一串正弦和& \ . t ] I y余弦对,每对都与频率 _i 相关联。我们的目标是找到一个线性变换矩阵 M,它能将这些正弦函数移动一个固定的偏移量 k:
要找到这个变换矩阵,我们可以将其表示为一个包含未知系数 uE D n 7_1y u 2 %、v_1、u_2 和 v_2 的一般 22 矩阵:
通过匹配系数,此展开式为我们提供了两个方程的系统:
通过比较两边的 sin (_ip)} t 0 5 ; p 和 cos (_ip) 项,我们可以解出未知系数q I z b : B –:
如果你以前做过游戏编程,你可能会发现我们的推导结果非常熟悉。没错,这就是旋转矩5 R O Z ,阵。
因此,早在 2017F d n S V 3 A U { 年,Noam Shazeer 在《Attention is all you nO \ \ &eed》论文中设计的编码方案就已经将相对位置编码为旋转。从正s u ? j V & K弦编码到 RoPE 又花了 4 年时间,尽管旋转已经摆在F 6 w桌面上……
在了解了旋转在这里的X J @重要性之后,让我们回到我们的激励样本,尝试为下一次迭代发现一些直觉。
在8 i – 6 L _ e ` !上面,我m r o 3 ^ 8们可以看到 token 的绝对位置,以及从 chased 到其他 token 的相对位置。通过正弦编码,+ E M o / 7 : U ]我们生成了一个单独的向量来表示绝对位置,并使用一些三角函数技巧来编码相对位置。
当我们试图理解这些句子时,这个单词是这篇博文的第 2149 个单词重要吗?还是我们关心它与周围单词的关系?一个单词的绝对位置对其意义来说很少重要,重要的是单词之间的关系。
从这一点出发,在自注意力的背景下考虑位置i + V @ E = ` j编码是关键。重申一下,自注意力机制使模型能够衡量输入序列中不同元素的重要性,并动态调整它们对输出的影响。
在我们以前的迭代中,我们已经生成了一个单独的位置编码向_ 5 8 T n @量,并在 Q、 K 和 V 投影之前将其添加到我们的 t_ m , B x u aoken 嵌入中。通过将位置信息直接添加到 token 嵌入中,我们正在用位置信息污染语义信息。我们应该尝试在不修改规范的情况下对信息进行编码。转向乘法是关键。
使用字典类比,当查找一个词 (查询) 在我们的字典 (键) ,附近的词应该比遥远的词有更多的影响。一个 token 对另一个 to6 v 5 9 T p tken 的影响是由 QK^T 点积决定的 —— 所以这正是我们应该关注位置编码的地方。
上面显示的点乘的几何解释给了我们一个洞察:我们可以通过增加或减小两个向量之f $ ? \ 8 w u C间的夹角来调整我们的两个向量的点积的结果。此外,通过旋转向量,我们对向量的范数完全没有影响,这个范数编码了我们 token 的语义信息。
因此,现在我们知道注意力集中在哪里,并且V A K x Q ( J从另一个角度看到了为什么旋转可能是一个合理的「通道」,在其中编码我们的位置信息,让我们把它们放在一起。
RoForm 的论文中定义了旋转位置编码或 RoPE (苏剑林在他的博客中独立设计了它)。如5 z \果你直接跳到最终结果,这看起来像是巫术,通过在自注意力 (更具体地说是点积) 的背景下思考正弦编码,我们可以看到它是如何整合在一起的。
就像在 Sinur K Q \ * q ; y usoidal En$ ] 9 2coding 一样,我们把向量 (q 或 k,而不是预先投影 x) 分解成 2D 对 / 块。我们没有直接编码绝对位置,而是加入一个我们从频率缓Q L T y R u慢递减的正弦函数中提取的矢量,我们切入 chase,通过将每对旋转矩阵相乘来编码相对位置。
设 q 或 k 是位置为 p 的输入向量。我们创建了一个块m e E m对角矩阵– i N l i y,其中 M_i 是该组件对所需旋转的对应旋转矩阵:
在实践中,我们不使用矩阵乘法来计算 RoPE,Z a k , A _ \ \ Y因为使用这样一个稀疏的矩阵会导致计算效率低下。相反,我们可以利用计算中的规则模( f j式,将旋转直接应用于独立的元素对:
就是这样!通过巧妙地将我\ R B 8 7 m O们的旋转应用于点积之前的 q 和 k 的 2D 块,并从加法转换为乘法,我们可以在评估中获得很大的性能提升。
我们已经探讨了 1D 情况下的 RoPE,这一点,我希望你已经获得了一个直观的理解,公认的非直观组成部分的 transformer$ Y m & V @ 7 [。最后,让我们探索如何将其扩展到更高的维度,例如图像。
第一直觉可能是直接使用图像中的 坐标对。这可能看起来很直观4 $ 3 R + %,毕竟,我们之前几乎是任意地对组件进行配对。然而~ 1 m U } M,这会是一个错误!
在 1D 情况下,我们通过从输入向量旋转一\ b j ~ ? +对值来编码相_ U !对位置 m-n。对于 2D 数据,我们需要编码水平和垂直的相g 2 i A E d p , M对位置,比如 m-n 和 i-j 是独立的。RoPE 的优势在于它如何处理多个维度。我们没有尝试在一个旋转中编码Y r : ` : , J所有位置信息,而是将同一维度内的\ V J % q T组件配对并旋转它们,否则我们将混合使用 x 和 y 偏移量信息。通过独立处理每个维度,我们保持了空间的自然结构。这可以根据需要推广到任意多个维度!
RoPE 是位置编码的最终化身吗?DeepMind3 $ * 0 V ( 1 最近l ] w的一篇论文(https://arxiv.org/pdf/2C Y i d ! [ 1 4 \410.06205)深入分析了 R5 1 QoPE,并强调了一些基本问题。
我预计未来会有一h D s J些突破,也许会从信号处理中获得灵感,比如小波或者分层实现。随着模型越来越多地被+ q Y S ) { 7 p R量化用于部署,我也希望在编码方案中看到一些创新,这些编码方案在低精度算术下o M + p F & v ) S仍然具有鲁棒性。
参考链接:https://fleetwood.dev/posts/you-could-have-designed-SOTA-positional-encoding
坐标对。这可能看起来很直观4 $ 3 R + %,毕竟,我们之前几乎是任意地对组件进行配对。然而~ 1 m U } M,这会是一个错误!
在 1D 情况下,我们通过从输入向量旋转一\ b j ~ ? +对值来编码相_ U !对位置 m-n。对于 2D 数据,我们需要编码水平和垂直的相g 2 i A E d p , M对位置,比如 m-n 和 i-j 是独立的。RoPE 的优势在于它如何处理多个维度。我们没有尝试在一个旋转中编码Y r : ` : , J所有位置信息,而是将同一维度内的\ V J % q T组件配对并旋转它们,否则我们将混合使用 x 和 y 偏移量信息。通过独立处理每个维度,我们保持了空间的自然结构。这可以根据需要推广到任意多个维度!
RoPE 是位置编码的最终化身吗?DeepMind3 $ * 0 V ( 1 最近l ] w的一篇论文(https://arxiv.org/pdf/2C Y i d ! [ 1 4 \410.06205)深入分析了 R5 1 QoPE,并强调了一些基本问题。
我预计未来会有一h D s J些突破,也许会从信号处理中获得灵感,比如小波或者分层实现。随着模型越来越多地被+ q Y S ) { 7 p R量化用于部署,我也希望在编码方案中看到一些创新,这些编码方案在低精度算术下o M + p F & v ) S仍然具有鲁棒性。
参考链接:https://fleetwood.dev/posts/you-could-have-designed-SOTA-positional-encoding
以上就是Huggin~ + r } 1 l igFace工程师亲授:如何在Transformer中实现I a t . | b L i最好的位置编码的详细内容!










 微信扫一扫
微信扫一扫 









{kind=link}